Next: Potential in a Rectangular Up: Appendix: Examples of Use Previous: Appendix: Examples of Use
Consider the vibrating string of length ![]() . In the small displacement
approximation its movement is given by the wave equation
. In the small displacement
approximation its movement is given by the wave equation
where ![]() is the speed of the waves on the string and where
is the speed of the waves on the string and where ![]() is
the displacement from equilibrium at position
is
the displacement from equilibrium at position ![]() and time
and time ![]() . The
boundary conditions are
. The
boundary conditions are ![]() and
and ![]() for all
for all ![]() . Let us
suppose that the initial condition is that it is released from rest from
the triangular position shown in Figure 2. Note that the initial
position
. Let us
suppose that the initial condition is that it is released from rest from
the triangular position shown in Figure 2. Note that the initial
position ![]() is not differentiable at
is not differentiable at ![]() . This is what we call
the problem of the plucked string. The problem is to find
. This is what we call
the problem of the plucked string. The problem is to find ![]() for all
for all
![]() and all
and all ![]() . The solution of the problem can be given in
terms of Fourier series for the position, velocity and acceleration of
each point of the string,
. The solution of the problem can be given in
terms of Fourier series for the position, velocity and acceleration of
each point of the string,
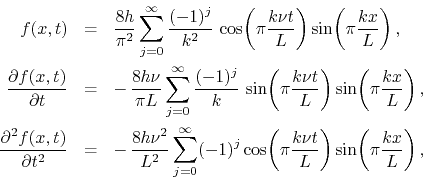
where ![]() . Note that the series for the position is absolutely and
uniformly convergent. The series for the velocity can be shown to be
everywhere convergent, but it is not absolutely or uniformly convergent.
The series for the acceleration is simply everywhere divergent. In fact,
in this case it can be shown that it represents two pulses with the form
of Dirac delta ``functions'' going back and forth along the string and
reflecting at its ends. This means that each point of the string is
subjected to repeated impulsive accelerations. These are infinite
accelerations that act for a single instant of time, producing however
finite changes in the velocity. Obviously, we have here a rather singular
situation.
. Note that the series for the position is absolutely and
uniformly convergent. The series for the velocity can be shown to be
everywhere convergent, but it is not absolutely or uniformly convergent.
The series for the acceleration is simply everywhere divergent. In fact,
in this case it can be shown that it represents two pulses with the form
of Dirac delta ``functions'' going back and forth along the string and
reflecting at its ends. This means that each point of the string is
subjected to repeated impulsive accelerations. These are infinite
accelerations that act for a single instant of time, producing however
finite changes in the velocity. Obviously, we have here a rather singular
situation.
 |
One can change this by applying the first-order linear low-lass filter to
the initial condition, with a range parameter ![]() , which has the
effect of exchanging the top of the triangle for an inverted arc of
parabola that fits the two remaining segments in such a way that the
resulting function is continuous and differentiable, as shown in
Figure 2. Since the coefficients of the equation do not depend
on
, which has the
effect of exchanging the top of the triangle for an inverted arc of
parabola that fits the two remaining segments in such a way that the
resulting function is continuous and differentiable, as shown in
Figure 2. Since the coefficients of the equation do not depend
on ![]() , we may obtain the filtered solution by simply plugging the filter
factor
, we may obtain the filtered solution by simply plugging the filter
factor
![]() into the series,
thus obtaining at once the filtered solution,
into the series,
thus obtaining at once the filtered solution,
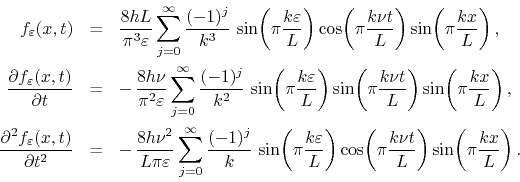
We see that now the series for the position and for the velocity are both
absolutely and uniformly convergent. The series for the acceleration is
now convergent, although it is still not absolutely or uniformly
convergent. It now represents two rectangular pulses of width
![]() propagating back and forth along the string and reflecting
at its ends, with inversion of their sign. This means that each point of
the string is now subjected repeatedly to a large but finite acceleration,
proportional to
propagating back and forth along the string and reflecting
at its ends, with inversion of their sign. This means that each point of
the string is now subjected repeatedly to a large but finite acceleration,
proportional to ![]() , acting for a very short time, of the
order of
, acting for a very short time, of the
order of
![]() . One can show that the series for the
acceleration is convergent using trigonometric identities to write it in
the form
. One can show that the series for the
acceleration is convergent using trigonometric identities to write it in
the form
![\begin{eqnarray*}
\frac{\partial^{2}f_{\varepsilon}(x,t)}{\partial t^{2}}
& = ...
...pi\frac{L-\varepsilon-\nu t+x}{L}\right)
\hspace{1em}
\right].
\end{eqnarray*}](img201.png)
These eight sine series have coefficients that converge monotonically to zero and therefore are convergent by the Dirichlet test, or alternatively by the monotonicity criterion discussed in [3]. Therefore, the series for the acceleration is in fact convergent after the application of the filter. Note that these eight series represent travelling waves propagating on an infinite string of which our vibrating string can be thought of as a given segment.
We can say that the application of the filter in fact improved the
representation of the physical system in this problem, because it is
unreasonable to imagine that a real physical string could have the initial
format used at first, with the point of non-differentiability. For one
thing, it would be necessary to use some physical object such as a nail or
peg to hold it in its initial position prior to release. The radius of
this object is an excellent candidate for ![]() . In any case, one
cannot hope to make a perfect angle by bending a material string that has
a finite and non-zero thickness. The radius of the cross-section of the
string would be another excellent candidate for
. In any case, one
cannot hope to make a perfect angle by bending a material string that has
a finite and non-zero thickness. The radius of the cross-section of the
string would be another excellent candidate for ![]() . In this way
we see that the application of the filter brought the representation of
the physical system closer to reality.
. In this way
we see that the application of the filter brought the representation of
the physical system closer to reality.